2.4 Data-Driven Modeling
2.4 Data-Driven Modeling
Introduction
Shell modeling can be achieved based on photographs/ aerial imagery or scanning model geometry from the real world using, for example, laser scanners. In this section, we will learn about A) Reality modeling and B) Scanning: Remotely Sensed Data such as LiDAR Point Clouds.
A. Reality Modeling
A. Reality Modeling
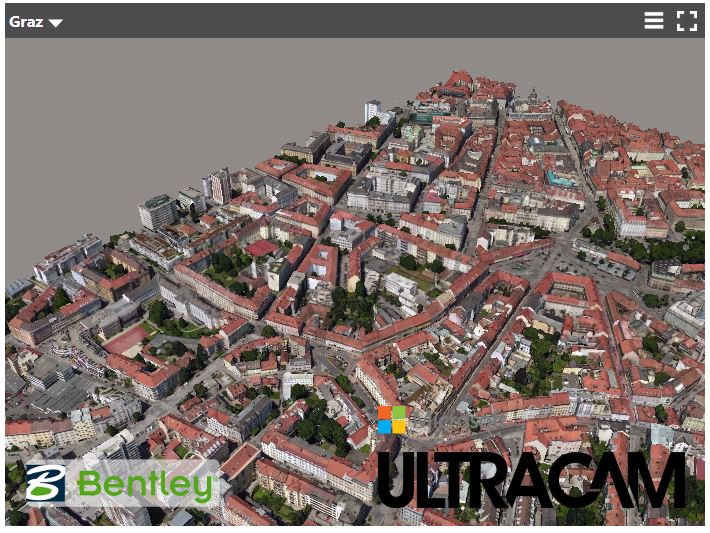
Reality models provide real-world context using aerial imagery and/or photographs. Technologies like 3D imaging and photogrammetry with the use of UAVs (unmanned aerial vehicle) provide these images to be used in software for converting a 2D map to a 3D model. Examples of software for this approach are ContextCapture by Bentley and VUE, PlantFactory, Ozon, Drone2Map by ESRI, or CarbonScatter by E-on.

LumenRT, for example, is an E-on software licensed by Bentley. It can create real-time immersive experiences. It presents a combination of tools that create ultra-high-definition videos and photographic images for 3D projects.
One of the methods for creating 3D structures from 2D images is structure from motion (SFM) photogrammetry. There are several software packages for creating and reconstructing three-dimensional structures: Agisoft, VisualSFM, CMPMVS, Meshlab, and Blender. For instance, Aibotix GmbH has created a 3D model of Castle Spangenberg in Germany using a combined mapping workflow. Data was collected with multirotor UAV Aibot X6 and ground surveying equipment. The collected data was then processed with the help of Agisoft PhotoScan.
Video: Drone surveying of Castle Spangenberg with the UAV Aibot X6 (2:07) This is video is not narrated, music only.
B. Scanning: Remotely Sensed Data Such as LiDAR Point Clouds
B. Scanning: Remotely Sensed Data Such as LiDAR Point Clouds
Data-driven modeling can also be achieved through point clouds to render exterior surfaces. A point cloud can be obtained by laser scanning. LiDAR as a system of collecting point clouds is explicitly explained in this section. The fact that point clouds do not contain any type of geometry is an important characteristic in modeling because they do not change the appearance or respond to scene lighting by default. They enable the designer to incorporate realistic 3D objects without having to model them. The drawback is that the objects are not editable with traditional techniques (Autodesk) [4]. Software that processes and supports point clouds as input data are Potree, Rhino, the Autodesk products, Blender, Pointools, Mathworks, and Meshlab.

LiDAR is an active remotely sensed method of collecting information. It uses active sensors that have their own source of light or illumination. There are two types of LiDAR systems: airborne and terrestrial scanning systems. Airborne Laser scanning known as LiDAR (Light Detection and Ranging) is a remote sensing technique that measures variable distances to the earth using a pulsed laser. Aircraft, helicopters, or UAVs (unmanned aerial vehicle) such as drones are common platforms for collecting LiDAR data. The LiDAR systems collect x, y, and z data at predefined intervals.
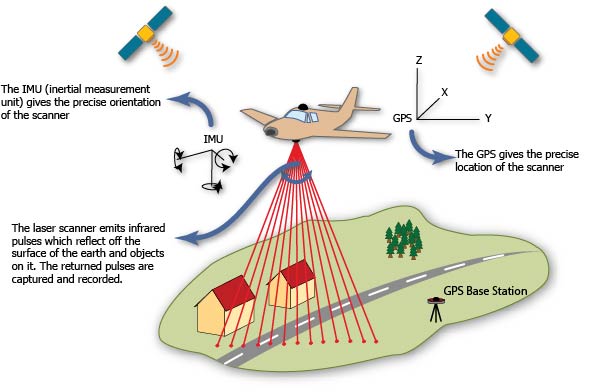
Based on LiDAR data, high-quality elevation models can be created. For instance, the airborne LiDAR data collected for the Penn State campus contains points at 25 cm intervals. LiDAR returns two types of elevation models: (1) a first return surface including anything above the ground such as buildings and canopy, it is referred to as DSM (digital surface model) and, (2) The ground or bare earth which is referred to as DEM (digital elevation model), it contains topography.
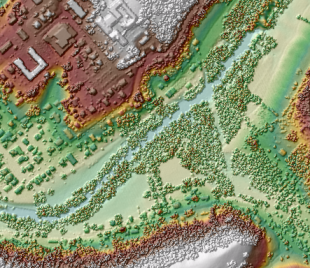
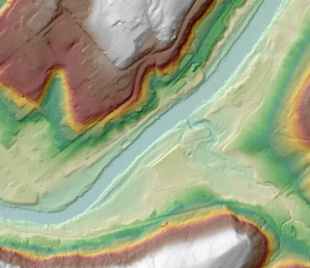
The workflows of DEM and DSM creation are outside of the scope of this course. Using these elevation models, buildings, trees, and roads can be extracted from the LiDAR data with elevation information. High-resolution LiDAR data can provide more precise information regarding height. Most GIS systems such as LiDAR analyst, LAStools, and Lp360 made the data extraction automatic or semi-automatic. For instance, the extracted information of buildings contains roof sections, shape size and estimated height of buildings. To detect more accurate height information, facade geometry, and textures, extra systems such as terrestrial laser scanning and photogrammetry should be incorporated into the model. Terrestrial or ground-based laser scanning (Terrestrial LiDAR) is used for high accuracy feature reconstruction. With a combination of airborne and terrestrial LiDAR more realistic 3D models can be created.
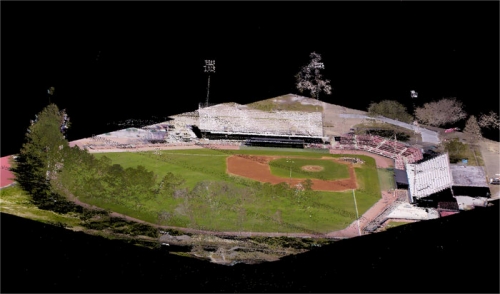
The following image shows how a LiDAR point cloud using an airborne LiDAR system can be colorized with RGB values from a digital aerial photo to produce a realistic 3D oblique view. There are numerous papers on developing algorithms that can automate the process of 3D modeling using LiDAR data and aerial photography.