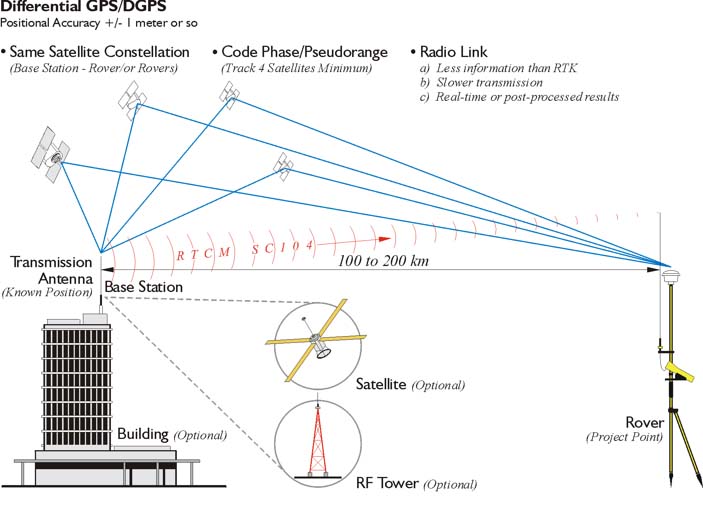
The term DGPS is sometimes used to refer to differential GPS that is based on pseudoranges, aka code phase. Even though the accuracy of code phase applications was given a boost with the elimination of Selective Availability (SA) in May 2000, consistent accuracy better than the 2-5 meter range still requires reduction of the effect of correlated ephemeris and atmospheric errors by differential corrections. Though the corrections could be applied in post-processing services that supply these corrections, most often operate in real-time. In such an operation, pseudorange based versions can offer meter- or even submeter results. Usually, pseudorange corrections are broadcast from the base to the rover or rovers for each satellite in the visible constellation. Rovers with an appropriate input/output (I/O) port can receive the correction signal and calculate coordinates. The real-time signal comes to the receiver over a data link. It can originate at a project specific base station, or it can come to the user through a service, of which there are various categories. Some are open to all users, and some are by subscription only. Coverage depends on the spacing of the beacons, aka transmitting base stations, their power, interference, and so forth. Some systems require two-way, some one-way, communication with the base stations. Radio systems, geostationary satellites, low-earth-orbiting satellites and cellular phones are some of the options available for two-way data communication. In any case, most of the wide variety of DGPS services were not originally set up to augment surveying and mapping applications of GPS; they were established to aid GPS navigation.