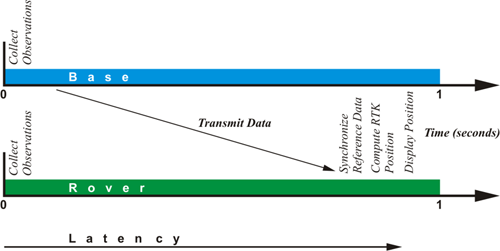
Latency
It takes some time for the base station to calculate corrections, and it takes some time for it to put the data into packets in the correct format and transmit them. Then the data makes its way from the base station to the rover over the data link. It is decoded and must go through the rover’s software. The time this takes is called the latency of the communication between the base station and the rover. It can be as little as a quarter of a second or as long as a couple of seconds. And since the base station's corrections are only accurate for the moment they were created, the base station must send a range rate correction along with them. Using this rate correction, the rover can back date the correction to match the moment it made that same observation.
Identical Constellation
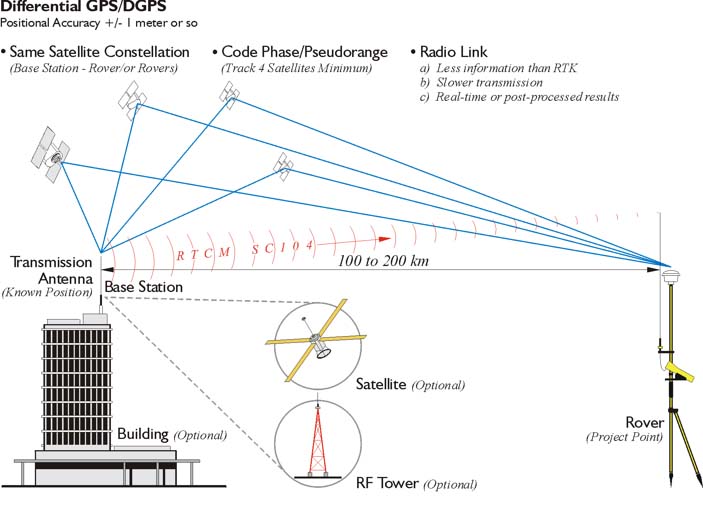
DGPS requires that all receivers collect pseudoranges from the same constellation of satellites. It is vital that the errors corrected by the base station are common to the rovers. The rover must share its selection of satellites with the base station; otherwise it would be necessary to create differential corrections for all the combinations of all the available satellites. That could get unmanageable in a hurry, for example, with just four satellites above the observer’s horizon, there can be more than 80 such combinations.
GIS Applications for DGPS
Aerial navigation, marine navigation, agriculture, vehicle tracking, and construction utilize DGPS. DGPS is also useful in land and hydrographic surveying, but perhaps the fastest growing application for DGPS is in data collection, data updating, and even in-field mapping for Geographic Information Systems (GIS). GIS data has long been captured from paper records, such as digitizing and scanning paper maps. Photogrammetry, remote sensing, and conventional surveying have also been data sources for GIS. More recently, data collected in the field with DGPS has become significant in GIS.
GIS data collection with DGPS requires the integration of the position of features of interest and relevant attribute information about those features. In GIS, it is frequently important to return to a particular site or feature to perform inspections or maintenance. DGPS with real-time correction makes it convenient to load the position or positions of features into a data logger, and navigate back to the vicinity. But to make such applications feasible, a GIS must be kept current. It must be maintained. A receiver configuration including real-time DGPS, sufficient data storage, and graphic display allows verification and updating of existing information.
DGPS allows the immediate attribution and validation in the field, with accurate and efficient recording of position. In the past, many GIS mapping efforts have often relied on ties to street centerlines, curb-lines, railroads, and so forth. Such dependencies can be destroyed by demolition or new construction. DGPS can provide reliable positioning even if the landscape has changed. And its data can be integrated with other technologies, such as laser range-finders, and so forth, in environments where DGPS is not ideally suited to the situation. Finally, loading GPS/GNSS data into a GIS platform does not require manual intervention. GPS/GNSS data processing can be automated; the results are digital and can pass into a GIS format without redundant effort, reducing the chance for errors.