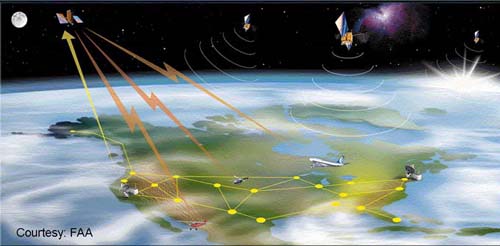
The correlation between most of the GPS biases becomes weaker as the rover gets farther from the base. The term Local Area Differential GPS (LADGPS), is used when the baselines from a single base station to the roving receivers using the service are less than a couple of hundred kilometers. The term Wide Area Differential GPS (WADGPS) is used when the service uses a network of base stations and distributes correction over a larger area, an area that may even be continental in scope. Many bases operating together provide a means by which the information from several of them can be combined to send a normalized or averaged correction tailored to the rover’s geographical position within the system. Some use satellites to provide the data link between the service provider and the subscribers. Such a system depends on the network of base stations on the ground receiving signals from the GPS/GNSS constellation and then streaming that data to a central computer at a control center. Then the corrections are calculated and uploaded to a geo-stationary communication satellite. You see that on the left with the yellow arrow going up as an upload to a satellite, Inmarsat. The satellite then broadcasts these correction signals to the service’s subscribers (i.e. aircraft).